Open Loop Stepper Motors
 Open loop stepper motors (sometimes called step motors or stepping motors) provide low cost motion control without the need for feedback devices such as encoders. However, if greater accuracy or step-loss detection is required, it is possible to use encoders with stepper motors and ORLIN also has a range of preconfigured closed loop stepper motors available.
Open loop stepper motors (sometimes called step motors or stepping motors) provide low cost motion control without the need for feedback devices such as encoders. However, if greater accuracy or step-loss detection is required, it is possible to use encoders with stepper motors and ORLIN also has a range of preconfigured closed loop stepper motors available.
Typical number of steps per revolution is 200, but this may be increased by microstepping for greater positioning resolution and operating smoothness. With the appropriate drive, microstepping can increase the resolution up to 51200 steps/rev.
ORLIN Technologies offers a range of stepper motors in various sizes. We also offer matching drives and programmable controllers for all models and integrated drives for most. An integrated motor is one where the drive is built into the unit which reduces wiring, takes up less space and eases installation.
Open Loop Stepper Motors – Models:
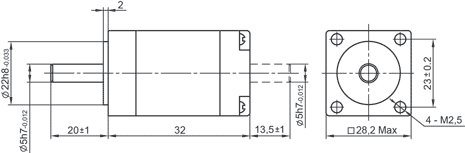
■ SM2832 – NEMA11
■ SM4247 – NEMA17
■ SM5776 – NEMA23
■ SM8680 – NEMA34
■ SM86118 – NEMA34 (long)
■ SM110201 – NEMA42
| STEPPER MOTOR | HOLDING TORQUE KGF*CM (N*M) | MAX CURRENT PER PHASE (amp) | DIMENSIONS (mm) | RESISTANCE PER PHASE (ohm) | INDUCTANCE PER PHASE (mh) | ROTOR INERTIA (G*CM²) |
|---|---|---|---|---|---|---|
| SM2832 | 0.4 (0.04) | 0.95 | 28 x 28 x 32 | 2.8 | 1 | 9 |
| SM4247 | 4.4 (0.43) | 1.68 | 42 x 42 x 48 | 1.65 | 2.8 | 68 |
| SM5776 | 18.9 (1.85) | 2.8 | 56 x 56 x 76 | 1.13 | 3.6 | 480 |
| SM8680 | 46 (4.51) | 4.2 | 86 x 86 x 80 | 0.75 | 3.4 | 1400 |
| SM86118 | 87 (8.53) | 6.0 | 86 x 86 x 118 | 0.6 | 6.5 | 2700 |
| SM110201 | 280 (27.45) | 8.0 | 110 x 110 x 201 | 0.67 | 12 | 16200 |
|
SM2832 – NEMA11 Specifications: • Maximum holding torque: 0.43kgf*cm (0.042 N*m) Dimensions:
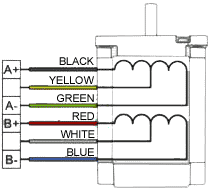
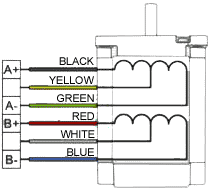
Wiring:
|
|
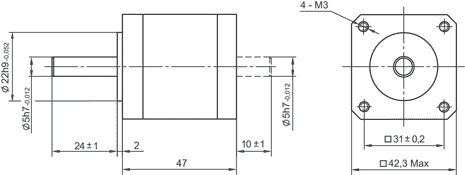
SM4247 – NEMA17 Specifications: • Maximum holding torque: 4.4 kgf*cm (0.43 N*m) Dimensions:
|
|
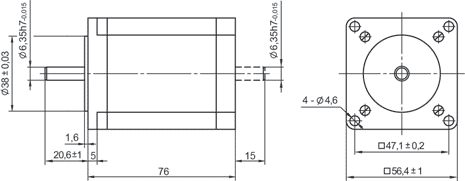
SM5776 – NEMA23 Specifications: • Maximum holding torque: 18.9 kgf*cm (1.85 N*m) Dimensions:
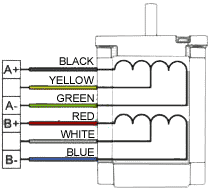
Wiring:
|
|
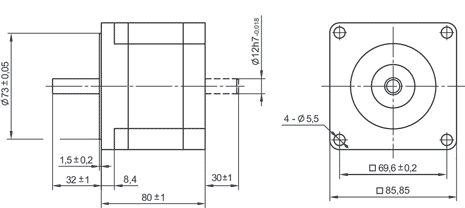
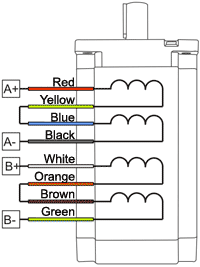
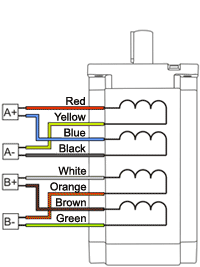
SM8680 – NEMA34 Specifications: • Maximum holding torque: 45 kgf*cm (4.4 N*m) – bipolar wiring. Dimensions:
Wiring – Serial:
Wiring – Parallel:
|
|
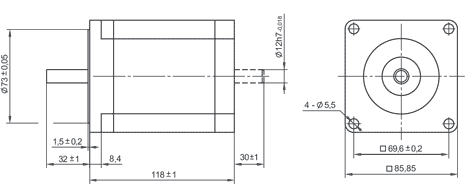
SM86118 – NEMA34 (long) Specifications: • Maximum holding torque: 85 kgf*cm (8.3 N*m) – bipolar wire connecting. Dimensions:
Wiring:
|
|
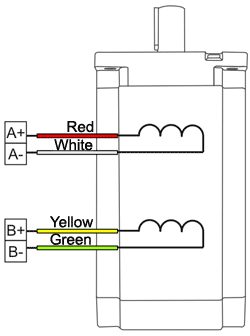
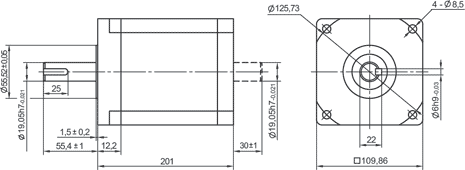
SM110201 – NEMA42 Specifications: • Maximum holding torque: 300 kgf*cm (29 N*m) Dimensions:
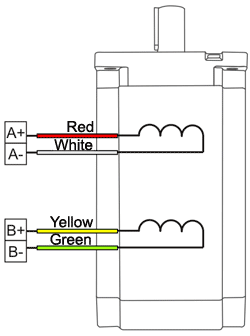
Wiring:
|
If you would like to know more about our open loop stepper motors, please just get in touch!
Brushless DC Servo Motors
Coming soon!
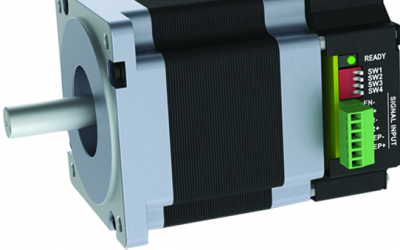
Integrated Stepper Motors
Integrated stepper motors have the driver mounted directly on the motor for ease of i…
Closed Loop Stepper Motors
Excerpt for product to be confirmed

Step-Direction Stepper Motor Drivers
Stepper Motors are widely used in CNC machines, robotics, process automation systems …